선형성: 예측 가능한 비례 관계
선형성 : 직선의 형태를 띠는 성질, 두 집합의 순수한 비율로 구성된 1차적 대응 관계를 의미
수학에서의 선형성은 가법성과 1차 동차성을 모두 만족하는 함수의 성질
- 가법성 : f(x1 + x2) = f(x1) + f(x2)
- 1차 동차성 : f(kx) = kf(x)
벡터 공간의 선형 변환
표준기저벡터의 선형 결합으로 형성된 벡터 공간은 선형성을 지님
벡터 공간을 선형 함수로 변화시킨 새로운 공간도 기저벡터의 선형 결합으로 형성되므로 선형성을 지님
이렇게 두 공간이 동일한 구조를 지닐 때 두 공간의 대응 관계를 변환이라고 부름
선형성을 유지시켜주는 선형 함수는 선형 변환이라고 함
행렬
선형 변환의 계산 과정을 체계화하여 손쉽게 계산할 수 있는 편리한 도구
수를 사각형의 형태로 행과 열을 맞춰 배열한 테이블
(x, y)로 구성된 2차원 벡터에서 A는 열벡터, B는 행벡터

선형 변환을 표현할 때는 행과 열의 크기가 같은 정방행렬을 사용
행렬의 기본 연산
행렬과 행렬의 덧셈 : 행렬의 크기가 같은 경우에만 성립

행렬과 스칼라의 곱셈

행렬의 전치 : 행과 열을 바꾸는 작업

행렬의 곱셈 : 행벡터와 열벡터를 각각 곱하는 방식
교환법칙이 성립하지 않음

결합법칙이 가능하고, 행렬 곱을 전치한 결과는 순서를 바꾼 후 각각 전치해 곱한 결과와 동일

결합법칙은 그래픽 연산의 계산량을 크게 줄여줌
- 100개의 점으로 구성된 물체가 5번의 선형 변환이 일어날 때, 각 점마다 5번의 행렬 곱이 수행되므로 행렬 곱의 총 횟수는 500
만약 5번의 선형 변환에 대한 결과 행렬 F를 만들고 각 점에 F만 곱하면 행렬 곱의 총 횟수는 104
행렬의 설계
두 표준기저벡터 (1,0)과 (0,1)이 (a,c)와 (b,d)에 대응되어 변환될 때를 생각해보자
w = x(a,c) + y(b,d) = (ax+by, cx+dy)

표준기저벡터가 정방행렬을 구성하는 열벡터임을 알 수 있음
이를 활용해 원하는 형태로 공간이 변화되도록 행렬을 설계할 수 있음
크기 변환행렬
표준기저벡터 e1을 a배, e2를 b배 변화시키는 행렬

회전 변환행렬
각 theta로 벡터 공간을 회전시키는 회전 변환행렬

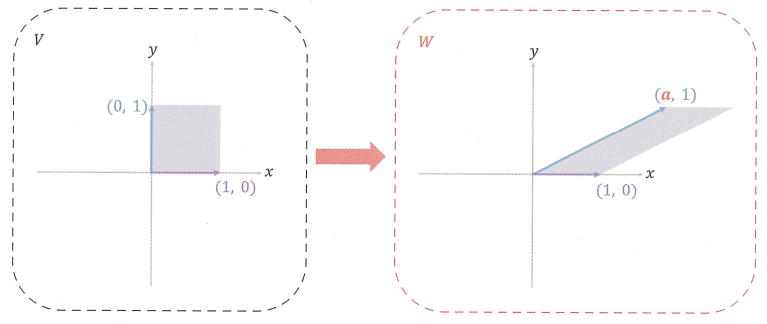
전단 변환행렬
두 표준기저벡터 중 하나의 표준기저벡터만 변환하는 행렬
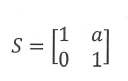
x축 방향으로 a만큼 변환하는 전단 변환행렬
삼각함수의 덧셈 정리

역행렬
항등행렬 : 동일한 공간으로 유지하는 변환을 의미

역행렬 : 행렬곱의 결과가 항등행렬이 나오는 행렬
선형 변환된 벡터 공간을 다시 원 벡터 공간으로 되돌리는 선형 변환

역행렬의 존재를 판별하는 행렬식
행렬식 : 행렬이 역행렬이 존재하는지 파악할 수 있는 수식
행렬식의 값이 0이면 역행렬이 존재하지 않음

두 기저벡터의 기울기가 같아 2차원이 1차원으로 압축됐다고 볼 수 있고, 이는 원 공간의 정보가 소멸되기 때문에 원 벡터 공간으로 변환이 불가능해짐
크기 변환행렬의 역행렬
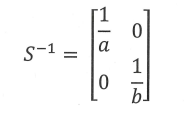
전단 변환행렬의 역행렬

회전 변환행렬의 역행렬
각 theta 회전했으므로 각 -theta만큼 회전하는 행렬을 구하면 됨
삼각함수의 성질을 이용
cos(-theta) = cos(theta)
sin(-theta) = -sin(theta)

회전행렬과 전치 관계에 있기 때문에 별도로 삼각함수를 사용하지 않아도 전치연산을 적용하여 쉽게 구할 수 있음
행렬 곱의 역행렬

'그래픽스 > 이득우의 게임 수학' 카테고리의 다른 글
| [이득우의 게임수학] 4장 삼각함수: 회전을 위한 수학 (0) | 2025.04.11 |
|---|---|
| [이득우의 게임수학] 3장 벡터: 가상 공간의 탄생 (0) | 2025.04.10 |
| [이득우의 게임수학] 2장 수: 가상 세계를 구성하는 가장 작은 단위 (0) | 2025.04.10 |







